The idea
A team of robots operates in sequence for the detection, multi-data imaging, and classification (e.g. landmine vs harmless clutter) by a remote operator of a potential threat. Potential threats are then digitally mapped in a geo-referenced coordinate system, and to the appropriate local team or authority for elimination.
|
The three robots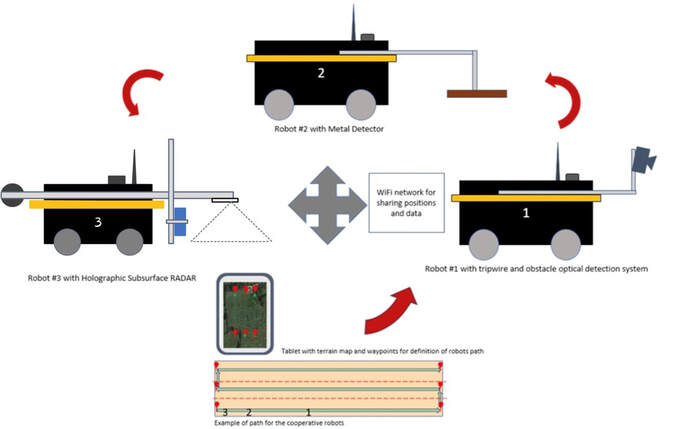
All robots securely share the data in real time with remote terminals and portable devices. Shared data is used to generate a data fusion display to classify explosive threats. The data integration of a robot with a metal detector and a robot with holographic subsurface Radar and a LIDAR is a key point, because the multiparametric imaging of shallow buried objects can improve classification of threats by the operator. One robot is equipped with an optoelectronic sensor and suitable image processing software for tripwire and obstacle detection. A team of specialized robots acts in cooperation to conduct detection, classification and mapping procedures for shallow threats.
The team of three robots is designed to be agile, lightweight, and optimized for specific tasks required by the minefield characteristics. |
The collaboration
This NATO SPS Multi-Year Project builds upon the previous SPS project ‘Holographic and Impulse Subsurface Radar for Landmine and IED Detection (U-GO 1st)’, which developed a remotely operable, multi-sensor, robotic device for the detection of land mines, unexploded ordnances (UXOs), and improvised explosive devices (IEDs).
|
Milestone 1 |
Milestone 2
|
|
|
|
|
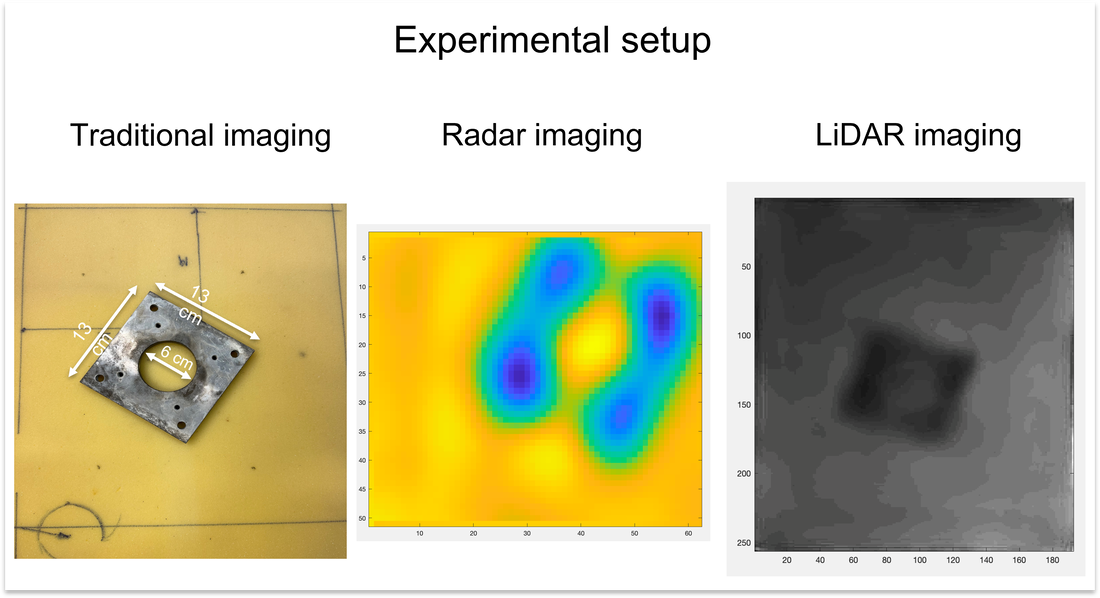
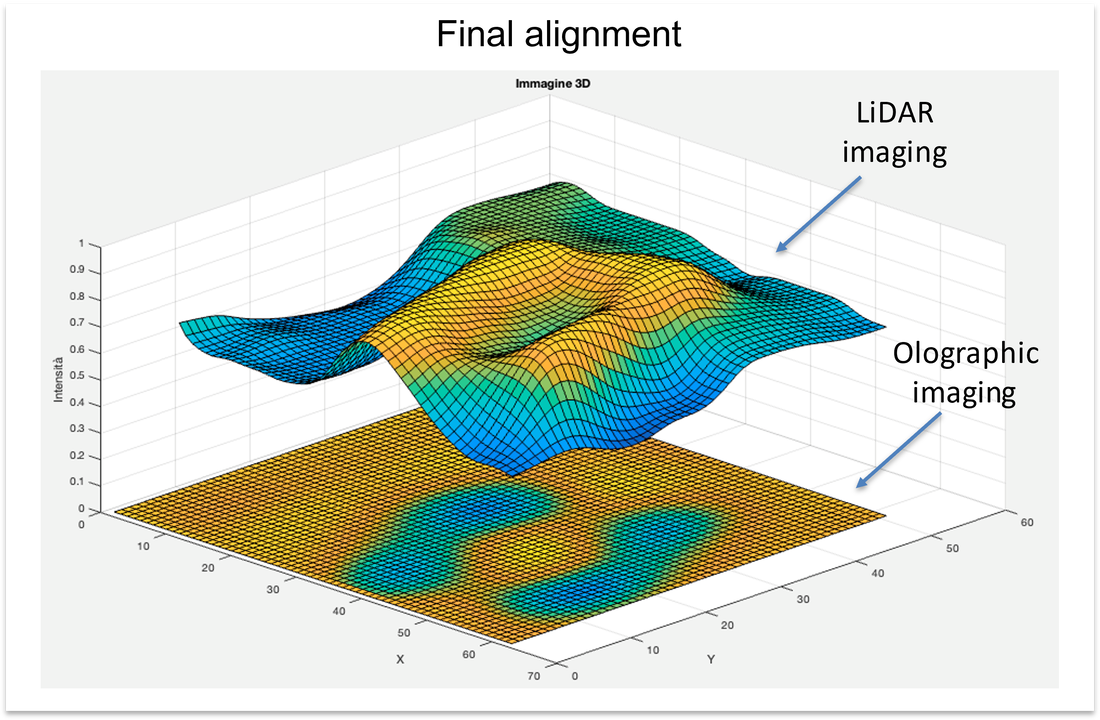
The experiment was performed in a closed and controlled environment inside the laboratory on a metal object of square shape (13 cm x 13 cm) and thickness 1 cm. On the left we see the optical image of the object, in the center the holographic scan in modulus. On the right is the depth image taken by LiDAR. The next operation concerns the actual alignment: by identifying the origin of the LiDAR reference system it must coincide with that of the holographic radar. The displacement in terms of mm is 50 along the vertical axis and 10 along the horizontal axis. Here is the final result of the alignment; the flat image below represents the hologram of the radar, providing the response of the presence of an object, the one in 3D above the image of the LiDAR which produces a DEM, i.e., a digital elevation model that highlights the presence of an object in relief on the ground by attributing to each pixel the attribute related to the absolute elevation. Using this method, elements of variation in the radar image such as the contour of the central hole can be correlated with the depth variation via DEM. |
